

Всем привет!
Контроллер зеркал заднего вида (помощник парковки), разрабатывался для управлением электозеркалами на VW Golf MK3, но с успехом может использоваться и для любого другого автомобиля с электрозеркалами.
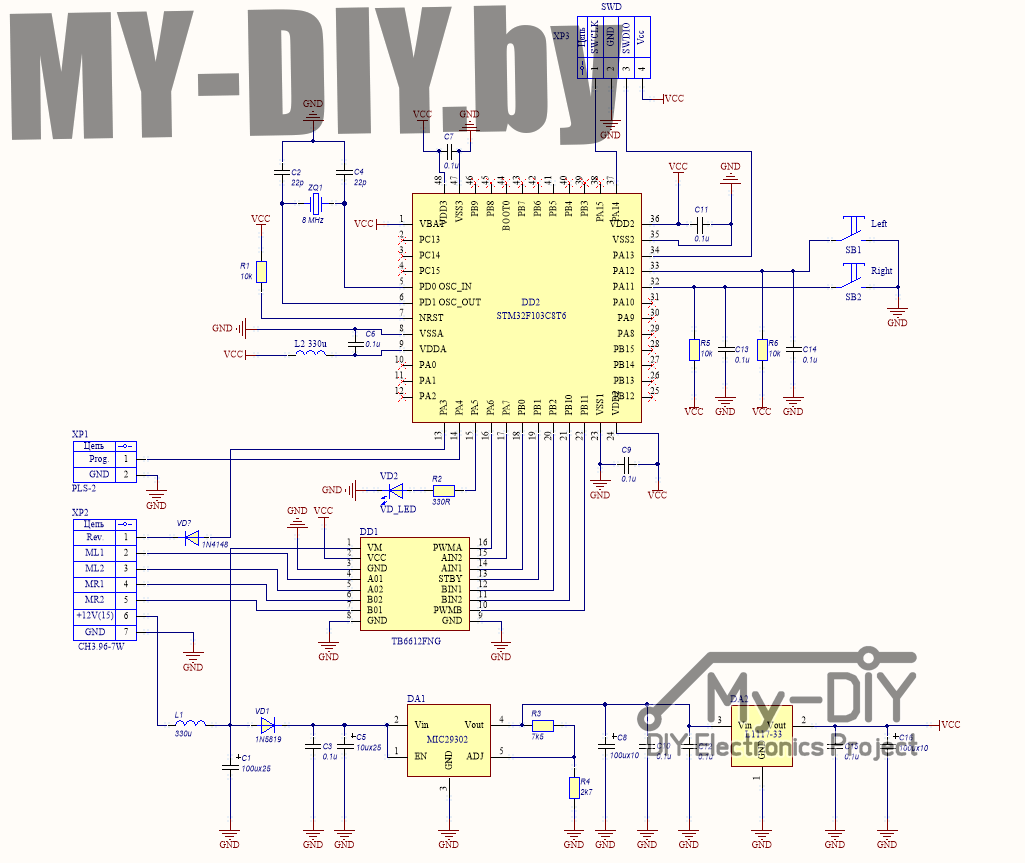
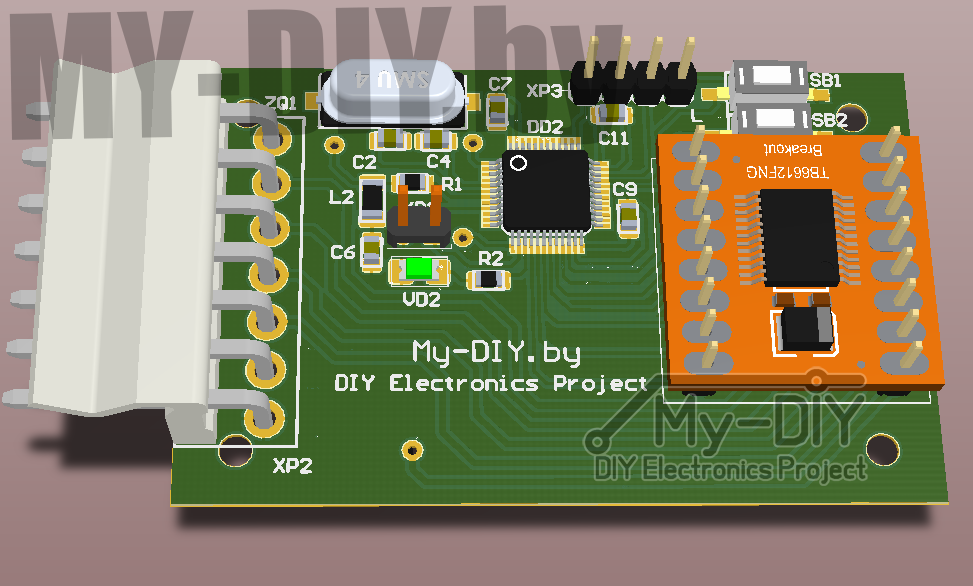
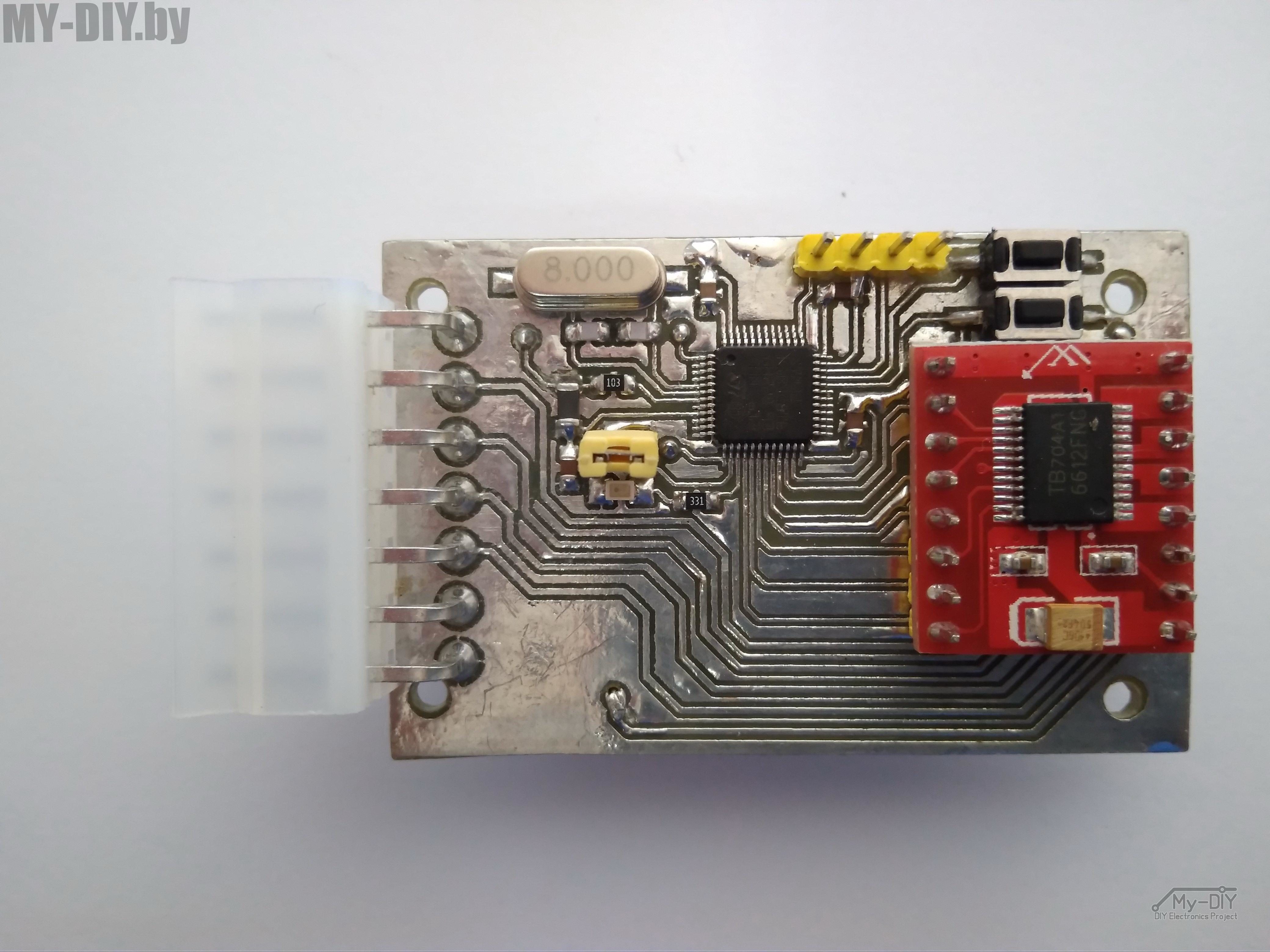
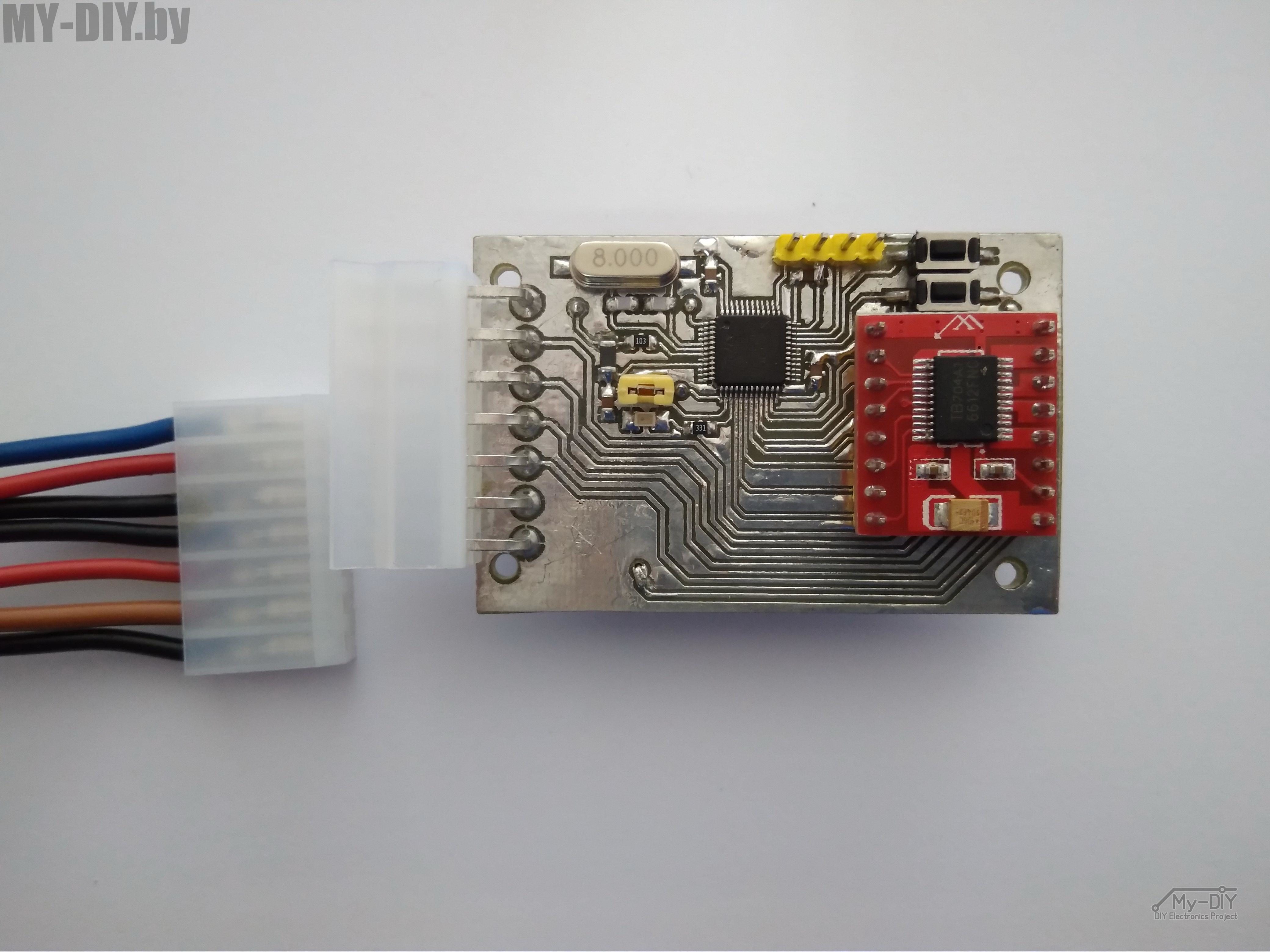
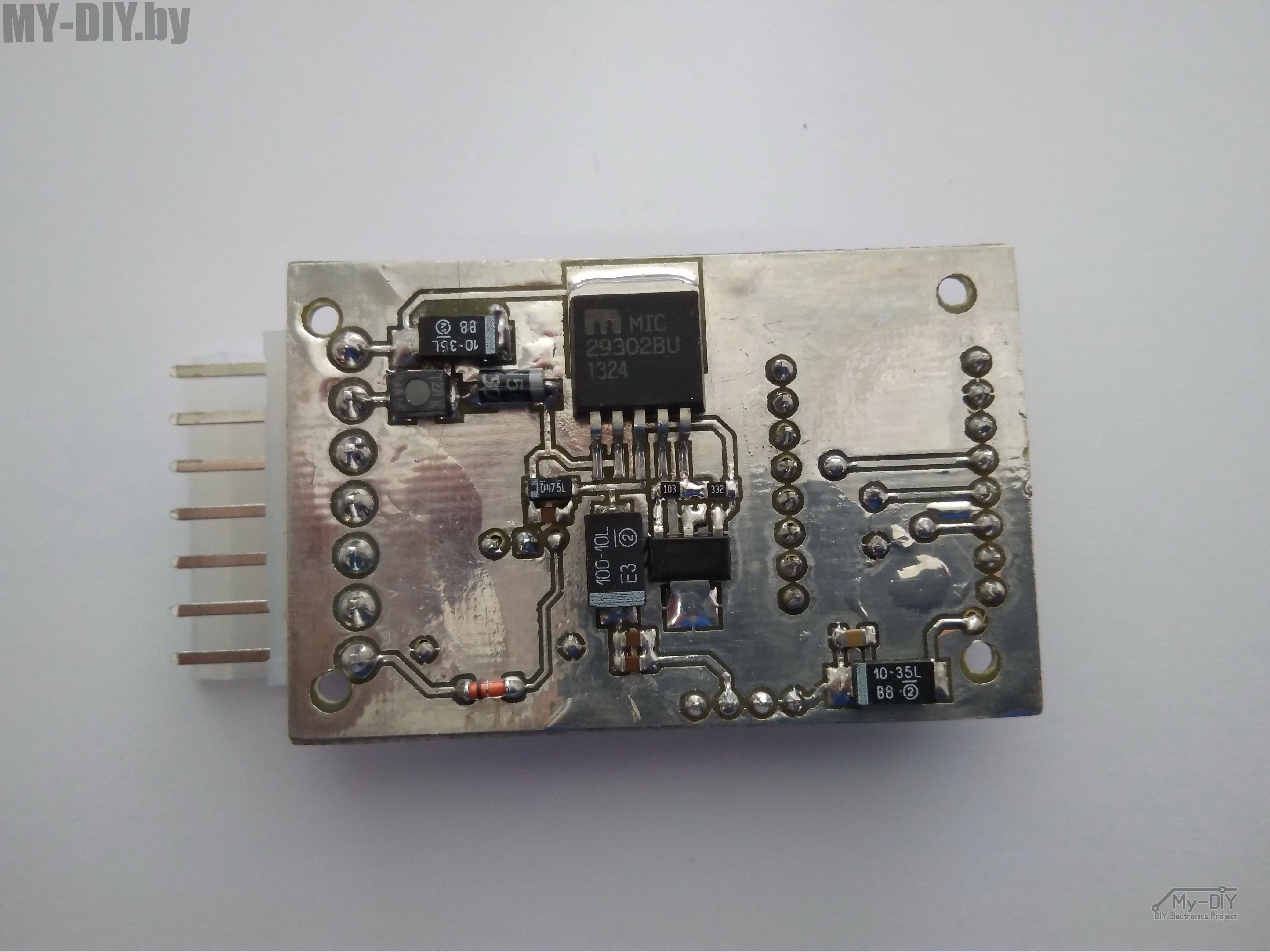
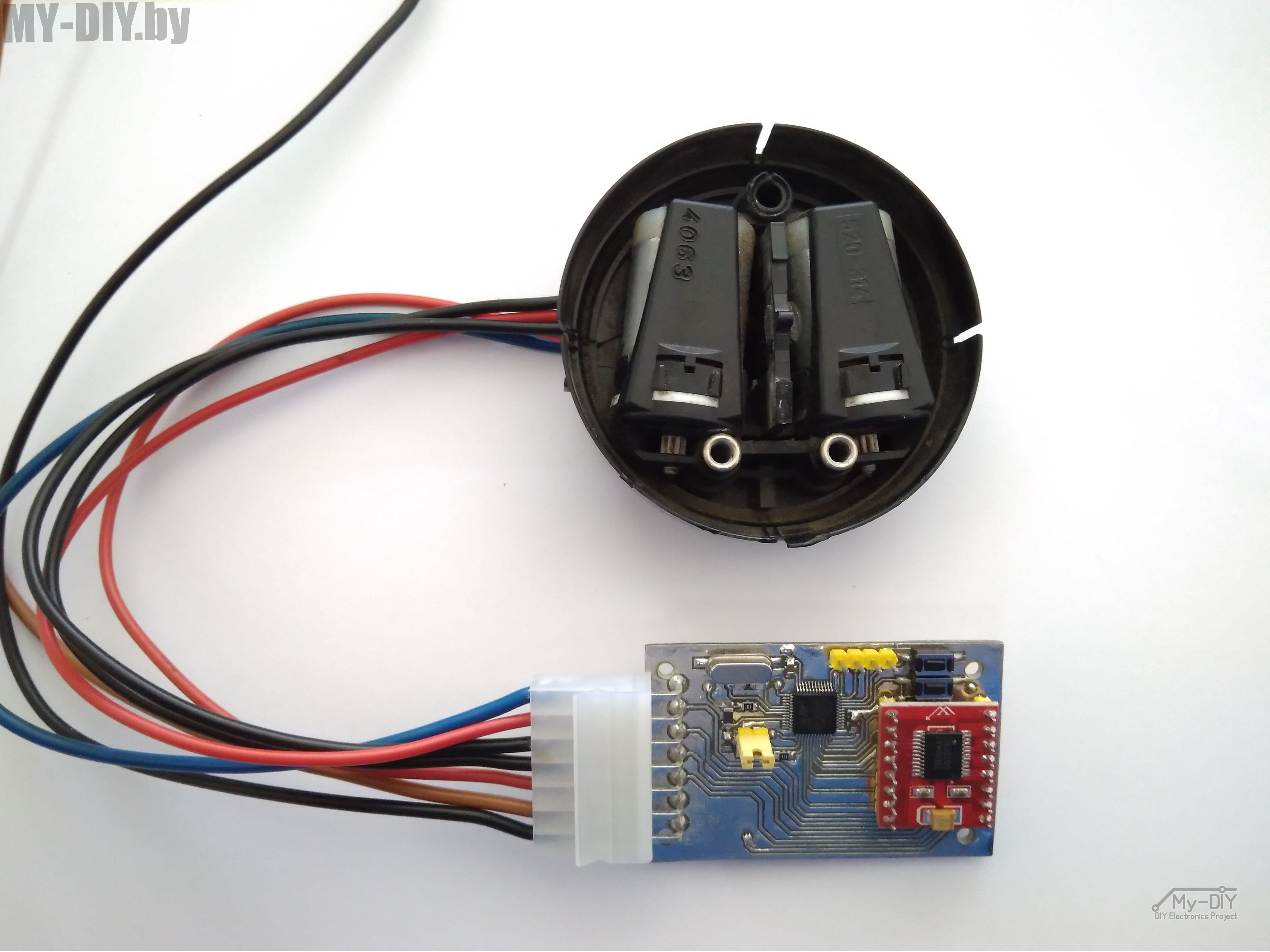
Итак, работает это все дело очень просто — включили задний ход, зеркала опустились, выключили — поднялись. Схемотехника простая до безобразия, датчиков положения зеркал и датчиков тока нет, на борту STM32F103C8T6 и двухканальный драйвер моторов на TB6612FNG.
Алгоритм работы проще некуда:
1. Установкой джампера входим в режим программирования.
2. Включаем задний ход и нажимая на кнопку SB1 опускаем левое зеркало в нужное положение. Каждое нажатие на кнопку опускает зеркало в течении 500 мсек. Если опустили зеркало ниже чем хотелось, выключаем задний ход, и нажимая на ту же кнопку поднимаем зеркало в нужное положение. В этом случае каждое нажатие на кнопку поднимает зеркало в течении 500 мсек. Каждое нажатие на кнопку инкрементирует, или декрементирует, в зависимости о состояния заднего хода, значение переменной, в которой хранится время работы мотора левого зеркала, на эти самые 500 мсек.
3. В этом пункте все тоже самое, что и в предыдущем, но уже для правого зеркала (если надо), и используется кнопка SB2.
4. Снимаем джампер, тем самым выходим из режима программирования, нажимаем на кнопку SB1 и значение переменной, в которой хранится время работы мотора левого зеркала записывается во флеш память. Нажатие на кнопку SB2 делает тоже самое, но уже для правого зеркала.
5. Все, можно пользоваться 🙂
Схемы и платы как всегда в Altium.
Плату для прототипа устройства пришлось делать самому. Для изготовления платы использовалась фоторезистивная технология.
В качестве подопытных использовались штатные моторы электрозеркал от VW Golf 3.



Ну и напоследок небольшое видео, демонстрирующее работу контроллера:
Да держишь нажатой и попеременно зеркала станут в нужное положение для парковки. Назад аналогично — нажимаем и держим джойстик вверх и все становится в положение для движения вперед